Квадрокоптер Next Gen?

Квадрокоптер ассоциируется с летающим дроном на радиоуправлении. Диковинная игрушка по типу семейства Parrot Ar Drone. Или компактная платформа для аэро фото- и видеосъемки. Но прогресс не стоит на месте. И команда энтузиастов из Оклендского университета взялась доказать это на практике. Новость о Loon Copter, безусловно, уже успела облететь рунет еще вчера. А потому не будем толочь воду в ступе и вместо очередного банального репоста yesterday’s news попробуем разобраться в том, есть ли у идеи практический потенциал. Оправдан ли весь этот хайп?
Тяга к скрещиванию мопса с носорогом в том числе и в технике испокон веков будоражила умы ученых и конструкторов. Плавающие автомобили. Конвертопланы. Летающие подводные лодки и (здравствуй, наркомания?) подземные танки. Все это периодически фигурировало не только в научно-фантастических романах и наивных мечтах романтиков технократической эры, но и обретало вполне конкретную форму на чертежах во всевозможных КБ по всему миру.
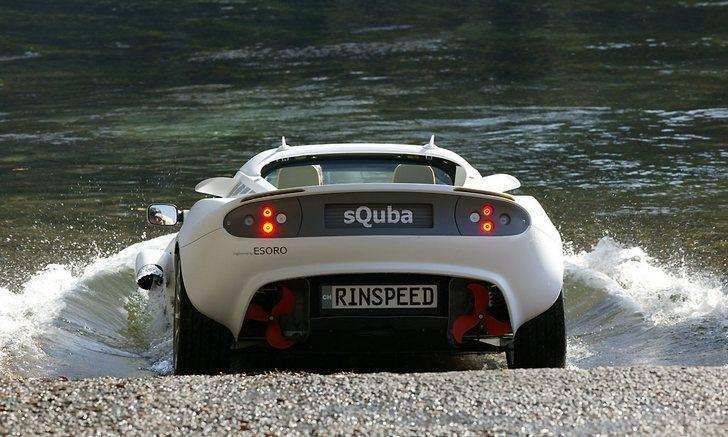
Иногда случались форменные чудеса. И некоторые атрибуты экипировки агента 007 сходили с экрана, получая свои 15 минут телевизионной славы и пусть небольшую, но весьма преданную армию фанатов. Так случилось с Rinspeed Scuba – автомобилем-амфибией, приспособленным в том числе и для подводного плаванья. В нем без труда угадывается его киношный прототип из бондианы. Оба агрегата созданы на базе серийных автомобилей марки Lotus. А с недавних пор к клубу производителей scuba-автомобилей обещает присоединиться и Tesla Motors Илона Маска. Пока, правда, без конкретных сроков.






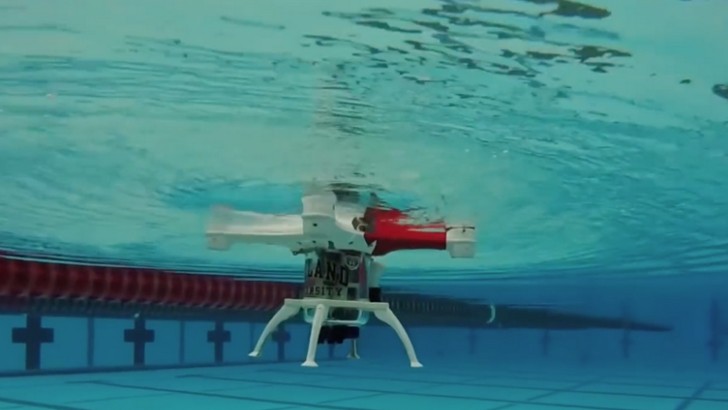
Как видим, по-доброму наивные мечты об универсальных машинах, одинаково эффективных независимо от окружающей их среды, никуда не делись. Как раз наоборот – благодаря все возрастающим темпам научно-технического прогресса начинают обретать вполне завершенную форму. Это уже не комичные мастодонты, но успешные коммерческие продукты. Решила не отставать от именитых коллег и академическая рабочая группа E2Rlab из вышеупомянутого американского университета. Забавы со стандартными квадрокоптерами этим безусловно талантливым инженерам очевидно показались слишком скучными. И они решили создать летающе-плавающе-ныряющий его вариант! Наглядная демонстрация возможностей их разработки приведена на видео с их официального Youtube-канала:
Так появился Loon Copter. Герметичное устройство, способное одинаково хорошо летать, плавать по поверхности воды и осуществлять подводные маневры. А главное – после всех этих мореходных пируэтов взлетать и повторять все то же самое снова! Воздушные винты в водной среде превращаются в гребные. Как видим, неизменной остается и высочайшая маневренность такого аппарата. Ряд вопросов, разумеется, вызывает отсутствие колец-протекторов вокруг лопастей. Ведь повреждение винтов при контакте с дном или какими-то другими подводными объектами может полностью вывести квадрокоптер из строя. Но на это можно вполне спокойно закрыть глаза. Ведь перед нами всего лишь опытный образец, а не серийная продукция.



Как уже сообщалось, Loon Copter по замыслу создателей проектировался для участия в исследовательских миссиях, поисково-спасательных операциях и прочих общественно полезных начинаниях. Безусловно, очень красивая, неординарная идея. Но вот сможет ли она на текущем технологическом уровне продвинуться дальше маленькой модели-демонстратора? По моему личному, субъективному, но аргументированному мнению, нет. Loon не сможет выполнять перечисленные выше функции по крайней мере еще 10 лет. И будет оставаться лишь очень крутой летающе-плавающе-ныряющей action-камерой. И вот почему:
- Долговременная эксплуатация такого дрона в условиях реальных поисковых миссий и научных инициатив подразумевает повышенный уровень автономности. На передвижение в водной среде энергии по понятным причинам тратится в десятки раз больше, чем на полет. А значит, Loon должен будет возить с собой емкий, а потому габаритный и относительно тяжелый аккумулятор. Это в свою очередь приводит к повышению требований к мощности двигателей. А значит, и ко всем весо-габаритным параметрам устройства. Здесь мы сталкиваемся с таким термином, как энерговооруженность.
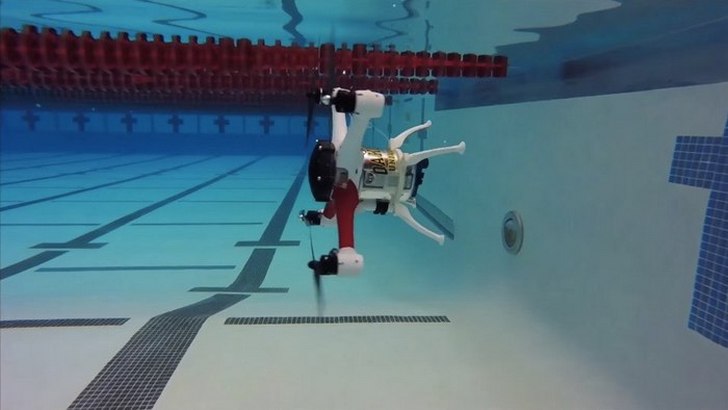
- Поисковые миссии в водной среде зачастую сопряжены с необходимостью погружения на глубины более 20 метров. А здесь уже на полную катушку на такое устройство начинает влиять давление. Корпусу нужно придавать дополнительную жесткость, что неизбежно ведет к увеличению массы. И вот мы снова повышаем требования к двигателям. А значит, и к емкости батареи.


Давление. Именно оно делает такие конструкции необходимыми
- В реальных условиях огромное лобовое сопротивление винтов такого аппарата не даст ему эффективно бороться с течениями. Фактически его основная конструктивная фишка – поворот на 90º при нырке – играет с квадрокоптером злую шутку. Она превращает вращающиеся винты и всю лобовую проекцию аппарата в аналог паруса. Только “дуть” в него будет течение. Это, увы, не полный штиль бассейна. Это – реальный мир. Именно из-за этого рыбы, суда и подводные лодки имеют обтекаемую форму. Именно по причине лобового сопротивления винта поршневые и турбовинтовые самолеты не могут преодолеть определенный порог скорости даже в воздухе. Именно борьба такого “паруса” с течениями в результате сделает его скорость абсолютно неприемлемой для практического применения. А львиная доля батареи в подводном режиме будет уходить именно на такую борьбу.


Физика – порой та еще сволочь!
Что же мы получаем в итоге? Красивую, технологичную и очень крутую игрушку для гика и видеоблогера. Эдакую летающе-плавающую GoPro. Однако с целым рядом ограничений по применению. В нынешнем виде Loon Copter, к великому сожалению, не сможет выйти за границы потребительского рынка. Все это, безусловно, лишь мое мнение. Однако законы физики – штука упрямая. И без кардинального пересмотра самой концепции такого аппарата рассчитывать на прорыв не следует. Мне остается пожелать безусловно очень талантливым и искренне болеющим за свое дело ребятам из E2Rlab вдохновения, упрямства и полного практического воплощения всех их замечательных идей. До скорого! :)