Познавательный Космоddrом. Марсоходы
Вот и пришло время для возрождения “Познавательного Космоddрома”. По многочисленным просьбам речь сегодня пойдет о роверах, которые ученые забросили на марсианские просторы. Так что, если слово “марсоход” вызывает у вас интерес, то смело можно жать “под кат”!
Пролог
Начнем, пожалуй, с определений. Сегодня мы смотрим на марсоходы — устройства, посланные на другую планету с целью спуска и дальнейшего перемещения по поверхности планеты для подробного изучения. Помимо подобных устройств на поверхность Марса также спускались так называемые АМС, автоматические межпланетные станции. Их отличие от марсоходов заключается в том, что они лишены возможности передвижения и собирают информацию, которая доступна исключительно в точке посадки.

Всего три страны смогли отправить космический аппарат на поверхность Марса, причем одна из этих стран уже не существует. СССР послал “Марс-2”, “Марс-3” и “Марс-6”, Великобритания — “Бигль-2”, а остальные же 8 аппаратов являлись собственностью США. Кстати, британский аппарат хоть и совершил успешную посадку, на связь с Землей так и не вышел. Вообще за все то недолгое время, что человек осваивает Красную Планету, из 12 попыток посадки только 9 смогли избежать крушения при контакте с поверхностью и лишь 7 из них смогли передать обратно в командный пункт какую-либо информацию.
Но давайте говорить про марсоходы, потому что АМС, как мне кажется, не настолько интересны. Всего к Марсу было запущено 6 марсоходов, из которых только 4 успешно работали хотя бы какое-то время. Посмотрим на них в хронологическом порядке.
ПрОП-М
Два идентичных советских аппарата, называемые изобилующей согласными аббревиатурой ПрОП-М (Прибор Оценки Поверхности – Марс), входили в состав миссий “Марс-2” и “Марс-3” в 1971 году. Обе эти миссии закончились неудачно: первый аппарат не смог осуществить мягкую посадку, при этом вписав себя в историю как первый антропогенный механизм, достигший поверхности Марса; второй хоть и смог сесть, не разбившись, передавал сигнал в виде серого фона и то только в течение недолгих 14,5 секунд, после чего контакт с ним был потерян.

Хоть советские планетоходы так и не стали первыми рабочими аппаратами в своем классе, это вовсе не значит, что в них не было ничего интересного. В отличие от своих последующих американских “коллег”, они были оснащены не уже привычными нам колесами, а шагающими “лыжами”, которые располагались по бокам. Данная конструкция была не так эффективна, как, например, гусеницы или колеса, но была выбрана из-за недостаточной изученности поверхности планеты на момент разработки аппарата.
Размеры ПрОП-М-ов составляли всего 25 х 22 х 4 см, а вес — 4,5 кг. По плану они могли отдаляться от своих неподвижных станций на дину кабеля, которым были к ней привязаны, т.е. на 15 метров.
Sojourner
Первым работающим марсоходом был аппарат Sojourner, который входил в состав американской миссии Mars Pathfinder. Название “Соджорнер” (буквально: “проезжий”, “пришелец”) появилось в результате конкурса, который проводило NASA. Победителем стал 12-летний мальчик, который, собственно, и придумал имя покорителю Марса, назвав его в честь женщины-борца против негритянского рабства – Соджорнер Трут.

Посадка миссии Mars Pathfinder успешно прошла 4 июля 1997 года, а контакт с ровером продлился до 27 сентября этого же года.

Аппарат представлял собой “машинку на радиоуправлении” размерами 65 х 48 х 30 см и весом в 10,6 кг (что на Марсе ровнялось примерно 4 кг), почти всю верхнюю панель которого занимала солнечная батарея. Из оборудования на борту имелось:
- Три камеры, две из которых были спаренными, образовывая стереосистему, и смотрели вперед, а одна — назад.
- Альфа-протон-рентгеновский спектрометр (APXS) для определения химического состава изучаемых пород.
- Антенна для связи с посадочной станцией, способная передавать сигнал на расстояние до 500 метров.
- Солнечная батарея, которая питала аккумулятор емкостью от 24 до 36 Ач (в зависимости от температуры).
Думаю, что многим нашим читателям будет особо интересно почитать о бортовых компьютерах, установленных на марсоходах. В случае с “Соджорнером” это был 8-разрядный камень Intel 80С85, работавшего на частоте 2 МГц, оперативная память объемом 512 КБ и твердотельный флеш-накопитель на 176 КБ. Напомню, что такая начинка была в 1997 году. Бортовое ПО умело составлять 3D-карты местности и выбирать наиболее короткие и безопасные маршруты до указанной точки.

Если вы крайне удивлены тем фактом, что столь передовой научный инструмент как марсоход обладает настолько слабыми техническими характеристиками, то спешу разъяснить. Космическая IT-инфраструктура довольно значительно отличается от земной и просто не успевает за темпами ее развития. Дело в том, что помимо необходимости простой надежности техники (любой глюк, баг или отказ может стоить миллиарды), космическая среда крайне агрессивна. Даже на Марсе, где есть какое-никакое, а магнитное поле, которое защищает поверхность от радиационного излучения, оно слабее земного примерно в 800 раз. Доза радиации, получаемая на поверхности планеты, составит 0,2-0,3 Гр/год, что примерно равно дозе облучения при нахождении на МКС. А во время полета к Марсу эта доза может быть в 2-3 раза выше. А раз эту дозу получает техника, это увеличивает необходимый запас ее прочности по сравнению с земными собратьями во много раз. Я когда-то даже слышал миф, что нельзя брать фотоаппараты в самолет (на высоту около 10 км), потому что там матрица может выгореть из-за космического излучения. Представьте, что тогда может произойти хотя бы немного выше.
Возвращаемся к “Соджорнеру”. Примерно за 83 сол (марсианских суток) он проделал путь вокруг своей посадочной станции длиной около 100 метров. Это стало значительным достижением, особенно учитывая тот факт, что изначально планировалось, что “Соджорнер” “проживет” не более 7 сол. За время своих исследований марсоход подробно изучил несколько камней, которым даже дали имена: «Барнакл Билл», «Йоги», «Скуби-Ду», «Моу».
В результате миссии Mars Pathfinder ученые смогли выяснить очень многое про химический состав грунта и пыли, а также подтвердить теорию о том, что раньше Марс был более теплым и влажным. Контакт с “Соджорнером” был потерян в 10:23 (UTC) 27 сентября 1997 года, когда посадочная станция перестала подавать и принимать сигнал. Через некоторое время безуспешных попыток восстановить связь миссия была официально признана оконченной. Точное место остановки “Соджорнера” на данный момент не известно, однако этот пробел будет восстановлен с запуском сверхточных камер на орбиту Марса в будущем.
Spirit и Opportunity
В 2004 году в рамках миссии Mars Exploration Rover (MER) на Марс были отправлены два идентичных марсохода под названиями “Спирит” и “Оппортьюнити”. 4 января 2004 года мягкую посадку в Кратере Гусева совершил “Спирит”, а через несколько дней, 25 января подобное повторил и “Оппортьюнити”, но на Плато Меридиана.

Как и в случае с миссией Pathfinder, для определения названий марсоходов был проведен конкурс под эгидой NASA. Выиграла его 9-летняя американская девочка с русскими корнями, Софи Коллиз.
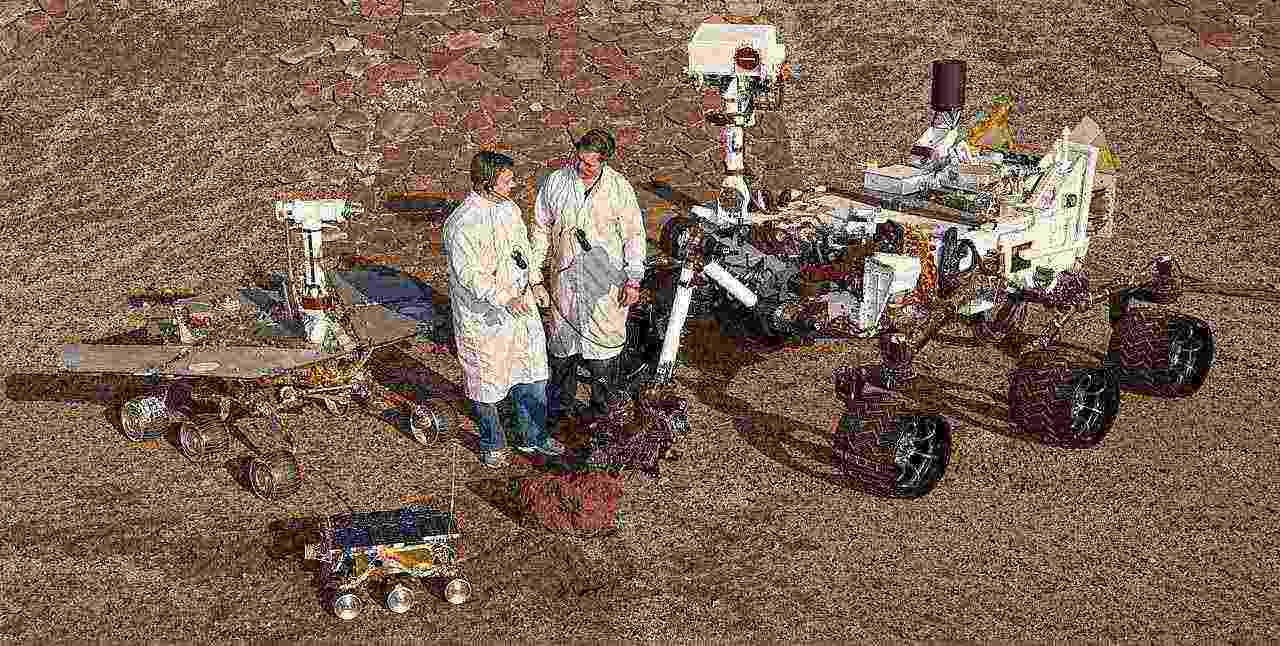
Оба аппарата MER были значительно больше, тяжелее и продвинутее в техническом и научном планах, чем их предшественник. При размерах в 1,6 х 2,3 х 1,5 м их вес составлял 185 кг (~70 кг на Марсе). Как и “Соджорнер”, марсоходы обладали 6 колесами (диаметром 26 см каждое) и большими солнечными батареями. В конструкцию были добавлены такие элементы, как мачта, на которой располагались камеры, и другие инструменты, а также рука-манипулятор с прикрепленным к ней буром и еще одной камерой.
Из аппаратуры на “Спирите” и “Оппортьюнити” можно было найти следующее:
- PanCam, панорамную камеру, делавшую цветные снимки с разрешением 1024 х 1024. Используется для изучения текстуры, цвета и структуры поверхности Марса.
- NavCams, камеру с широкоугольной линзой относительно низкого разрешения, которая используется для навигации.
- Микрокамеру (MI), способную делать снимки камней и пород с близкого расстояния в высоком разрешении (1024 x 1024) для их подробного изучения.
- HazCams, система из двух черно-белых камер с углом обзора в 120 градусов, используемых для обнаружения и определения препятствий.
- Три спектрометра: Mini-TES, MIMOS II, APXS, которые нужны для анализа химического состава изучаемого грунта.
- Магниты, используемые для сбора пыли и определяющие таким образом ее магнитные свойства.
- Инструмент для бурения, способный высверливать отверстия в скальных породах диаметром 45 мм и глубиной 5 мм.

Что до компьютеров марсоходов, которым мы договорились уделять особое внимание, то в близнецах MER использовались устройства на базе камня RAD6000 производства IBM, работавшего на частоте 20 МГц, 128 МБ оперативной памяти и 256 МБ твердотельного флеш-накопителя. Такая начинка стала значительным шагом вперед по сравнению с предшественником, однако даже на 2004 год это было не “топ-ов-зэ-шелф”. Причины этому все те же.
“Спирит”
Марсоход “Спирит”, сев на поверхность Марса 4 января 2004 года в Кратере Гусева, проработал вместо запланированных 90 сол целых 2210 сол, из которых 1892 сол он мог двигаться. Проехав в общей сложности около 7,7 км, 1 мая 2009 года он застрял в мягком грунте Красной Планеты, из которого так и не смог выбраться, несмотря на отчаянные попытки NASA решить данную ситуацию. После этого миссия продолжалась до 22 марта 2010 года, когда состоялся последний контакт “Спирита” с Землей. Все время “простоя” он продолжал изучать окружающую среду, хоть и не мог двигаться.

“Оппортьюнити”
“Оппортьюнити” был посажен на Марс 25 января 2004 года на Плато Меридиана, при этом оказавшись значительно удачливее своего чуть более старшего брата-близнеца. Запланированный срок службы также составлял 90 сол, но это не мешает “Оппортьюнити” работать и до сегодняшнего дня. Он является вторым планетоходом в истории по пройденному пути, покрыв за срок своей службы более чем в 36 км, уступая пока только “Луноходу-2”, при этом продолжая наращивать данный показатель даже прямо сейчас, пока вы читаете данную статью. Так что в ближайшее время у него есть все шансы догнать и перегнать “Луноход-2”. Не так давно “Оппортьюнити” отметил невероятную дату в 10 земных лет с момента посадки.

Результаты
Анализ информации с марсоходов сложно переоценить в научном плане. В результате полученных данных ученые смогли в очередной раз подтвердить теорию о том, что ранее Марс был более теплым и влажным. Более того, исследования камня под названием «Эсперанс-6», найденного “Оппортьюнити”, доказали, что он долгое время находился в потоках жидкости, которая была не чем иным, как пресной водой, пригодной для существования в ней живых организмов.
Curiosity
6 августа 2012 года на Марс успешно сел марсоход Curiosity (англ. любопытство). Хотя он был значительно больше своих предшественников — 899 кг (~340 кг на Марсе) с параметрами 3,1 х 2,7 х 2,1 м — и значительно лучше оснащен в плане аппаратуры, цели его были примерно такими же: изучать поверхность Марса и искать свидетельства воды и, может, даже жизни.

“Кьюриосити” — самый современный планетоход на момент написания данной статьи. Он настолько современный, что у него есть собственный твиттер, в котором он рассказывает об открытиях, постит фотографии Марса и жалуется на свою тяжелую долю. Есть и русский аналог, если кто-то из читателей не знает английского. Советую всем, кто еще не подписан на него, побыстрее сделать это.

Наверное, у вас уже возник вполне логичный вопрос, глядя на “Кьюриосити” в сравнении с предшественниками: от чего же он питается, ведь на нем нет больших солнечных батарей? Ответ прост — на его борту есть свой собственный радиоизотопный термоэлектрический реактор, подобный тем, что были на аппаратах “Викинг-1” и “Викинг-2”. Использование реактора позволяет получать постоянный ток в течение всего марсианского года и независимо от метеоусловий.
Давайте пройдемся по аппаратуре, установленной на марсоходе, коей, к слову, немало:
- MastCam, камера, установленная на мачте, которая на самом деле состоит из двух камер. Обе имеют матрицу с разрешением 2 МП, способны делать снимки 1600 х 1200 в реальном цвете. Разница между двумя камерами системы состоит в фокусном расстоянии — 100 мм с углом зрения в 5,1 градус и 34 мм с углом зрения в 15 градусов. Ранее для них разрабатывались объективы с зумом, но разработчики не успели доделать систему поддержания смазки в жидком состоянии, и от зумов пришлось отказаться. Минимальное расстояние фокусировки составляет 2,1 м, а пишутся изображения в RAW на флеш-память объемом 8 ГБ.
- Mars Hand Lens Imager (MAHLI), камера, располагающаяся на руке-манипуляторе, основная цель которой – снимать изучаемый объекты вблизи. Матрица идентична той, что используется в MastCam, при этом она способна детализировать объекты от 14 мкм (тоньше человеческого волоса). Есть белая и ультрафиолетовая подсветки. Последняя необходима для вызова излучения минералов, наличие которых говорит о присутствии воды.
- MSL Mars Descent Imager (MARDI), еще одна камера, расположенная на корпусе марсохода. Матрица идентична двум предыдущим. При посадке “Кьюриосити” на Марс MARDI сделала 4000 цветных снимков с частотой 3 fps.
- NavCams, система из 4 камер, располагающихся на мачте, служащих для помощи в навигации и позиционировании манипулятора.
- HazCams, система из 8 камер с широкоугольными объективами (угол обзора 120 градусов), расположенных впереди и сзади аппарата, при этом направленных вниз. Используются для обнаружения препятствий и последующего их избегания.
- ChemCam, камера-спектрометр, расположенная на мачте. Работая в паре с импульсным лазером, система испаряет кусок изучаемого объекта для проведения спектрального анализа на расстоянии. Такой подход позволяет не прибегать к использованию манипулятора, сохраняя время и энергию.
- APXS, спектрометр, облучающий образцы альфа-частицами.
- CheMin, мини-лаборатория, которая анализирует порошок, полученный при бурении и собранный ковшом CHIMRA.
- SAM, еще один инструмент для анализа твердых пород.
- RAD, детектор радиации, собирающий данные о фоне на Марсе. Его показания будут очень полезными для последующих человеческих экспедициях на Марс.
- DAN, инструмент для поиска водорода и водяного льда.
- REMS, мини-метеорологическая станция, исследующая атмосферные условия на Марсе.

Как и договаривались, об установленном компьютере поговорим отдельно. На Curiosity установлено два идентичных компьютера (один основной, один запасной) с процессорами RAD750 с частотой в 200 МГц, 256 кБ EEPROM, 256 МБ DRAM и аж 2 ГБ флеш-накопителя. За время работы на Марсе на первом компьютере произошел сбой, после чего пришлось полностью перейти на запасной аппарат. Сейчас работоспособность первого компьютера была восстановлена, однако перебираться на него обратно командный пункт не торопится.
Одной из самых впечатляющих фотографий, сделанных “Кьюриосити”, однозначно является селфи на фоне Марса (кликабельно).
 Эффект присутствия фотографирующего создан за счет того, что в вышеупомянутой фотографии было использовано 55 снимков, склеенных воедино. При этом рука-манипулятор, с помощью которой и было сделано данное фото, аккуратно вырезана. NASA даже выпустило специальный ролик, объясняющий, как все было сделано.
Эффект присутствия фотографирующего создан за счет того, что в вышеупомянутой фотографии было использовано 55 снимков, склеенных воедино. При этом рука-манипулятор, с помощью которой и было сделано данное фото, аккуратно вырезана. NASA даже выпустило специальный ролик, объясняющий, как все было сделано.
Для более полного эффекта можете надеть красно-синие очки и насладиться стереопарой.
“Кьюриосити” успешно продолжает исследовать Марс и по сей день. Не обходится и без технических проблем, как вышеупомянутые сбои основного компьютера. Совсем недавно начали проявляться и проблемы с износом колес, а буквально на днях в твиттере “Кьюриосити” показал довольно большую дырку в них.
Шел 556-ой сол. Колесо уже порвалось. Титановое колесо. Титановое! Слезы на моих объективах pic.twitter.com/Z2gFQwxJ8e
— Марсоход Curiosity (@CuriosityRU) 16 Март 2014
К слову, асимметричные квадратные отверстия — вовсе не механические повреждения. Они нужны для отслеживания следов и сопоставления их с данными о вращении колес. Если марсоход видит, что следов от отверстий не осталось, а колеса провернулись, то он посчитает, что застрял, отправит сообщение об этом в командный пункт, и остановит движение. Сделано это будет ради того, чтобы не повторить судьбу “Спирита”, навсегда зарывшегося в мягкий грунт.
“Кьюриосити” стал очень популярным в интернетах. Пожалуй, это самая широко известная космическая миссия последних лет. Марсоход появлялся, например, в таких хитах, как Angry Birds Space или сериале “Футурама”.
Будущие марсоходы
Исследования Марса с помощью движущихся аппаратов не планируют прекращать. В частности, NASA хочет запустить новую миссию с участием марсохода уже к 2020 году.
Но американцы – не единственные, кто занимается подобным. ESA, Европейское Космическое Агентство, также планирует запуск ровера в рамках миссии ExoMars. Строит его компания Astrium (часть корпорации, производящей Airbus), в недрах которой мне даже удалось побывать и воочию наблюдать за аппаратом, который в ближайшем (по меркам космоса) будущем будет бороздить просторы Красной Планеты.

Эпилог
На этом все. Конечно, каждый из рассмотренных объектов достоин отдельного гораздо более подробного обсуждения. Я же попытался свести воедино все самое интересное, при этом стараясь не перегрузить. Если у вас есть какие-нибудь вопросы, то я по возможности развернуто отвечу вам в комментариях, так что не стесняйтесь спрашивать.
Как обычно, не забываем нажать все кнопочки под статьей и расшарить ее ближнему своему. Оставляйте в комментариях темы для будущих “Познавательных Космоddромов”, самые актуальные обязательно появятся на страницах нашего сайта в ближайшем будущем.
До новых встреч!